Data Analysis for Investment & Control
아슈람의 DSP 제어보드 만들기[2/4] - 회로도 본문
이제 기본적인 보드 컨셉을 잡았으니, OrCAD를 이용, 회로 설계에 들어가기로 한다. 기본적으로 TI의 DSP C2000 계열 중 나름 최신 버전인(TMS320C2834x 시리즈가 출시 되었음) TMS320F28335를 사용하고, 외부 메모리는 DSP 보드를 제작할 때, 많이들 사용하고 있는 IS61WV25616BLL SRAM을 2개 사용하여, 256K x 32bit 용량을 가지는 32비트 외부 인터페이스를 사용하는 것으로 한다. 그밖의 DSP를 위한 전원은 TI 제품인 TPS767D301을 사용하며, 역시 TI의 MAX3232와 CAN Transceiver를 사용하여 통신 회로를 구성한다.
176핀짜리 DSP 칩 회로를 그리느라 생노가다를 해버렸다. 그래도 이 회로가 몇 번의 시행 착오를 거쳐 핀 네이밍 하기 편하도록 만든 버전이다. 전원이나 부트 모드 설정, 모터 제어를 위한 기타 다른 기능 핀은 모두 50핀 짜리 커넥터로 몰아버릴 생각이다.
DSP의 전원을 위한 레귤레이터 회로 부분이다. DSP가 1.9V와 3.3V를 사용하기 때문에, 전원 구성이 번거로울 수 있지만, 고맙게도 TI에서 자사의 DSP 칩을 사용하기 편리하도록 TPS767D301이라는 별도의 레귤레이터를 만들어 팔고 있다. 채널당 1A까지 허용하기 때문에, 왠만큼 주변회로를 달아도 저 칩하나로 충분히 커버할 수 있지 않을까 싶다.
MAX3232를 이용한 RS232 통신 회로이다. 보드 사이즈 때문에 D-SUB 커넥터가 아닌 3핀짜리 몰렉스 커넥터를 사용한다. RS232의 Rx와 Tx를 연결할 때마다 항상 헷깔린다. CAN Transceiver처럼 핀 네이밍이 좀 다르게 되어 있으면 이런 불편은 없을텐데....
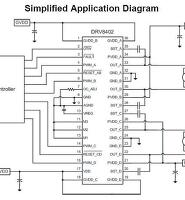
TI의 SN65HVD233 CAN Transceiver를 이용한 CAN 통신 회로이다. 역시 구성이 간단하다. RS232와 마찬가지로 보드 사이즈 때문에, D-SUB 커넥터 대신 3핀 몰렉스 커넥터를 사용한다.
외부 메모리는 IS61WV25616BLL이라는 256K x 16 용량을 가지는 메모리를 두개 사용하여 32bit 데이터 버스로 인터페이스 하도록 구성하였다.
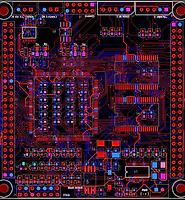
자, 이제 커넥터 등의 단순 반복 잡업을 요구하는 부분의 설계를 진행하고, 다음 단계인 PCB 아트웍 작업을 진행하기로 하자.







'Robotics > DIY' 카테고리의 다른 글
| 아슈람의 DSP 제어보드 만들기[4/4] - 조립 및 테스트 (5) | 2009.07.09 |
|---|---|
| 아슈람의 DC 모터 드라이버보드 만들기[1] - 개요 (2) | 2009.06.24 |
| 아슈람의 DSP 제어보드 만들기[3/4] - PCB 아트웍 (1) | 2009.06.23 |
| 아슈람의 DSP 제어보드 만들기[1/4] - 개요 (2) | 2009.06.17 |